



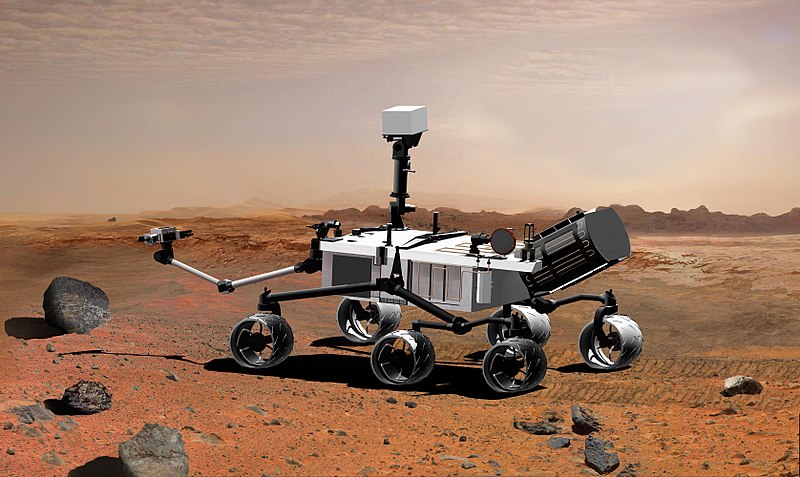
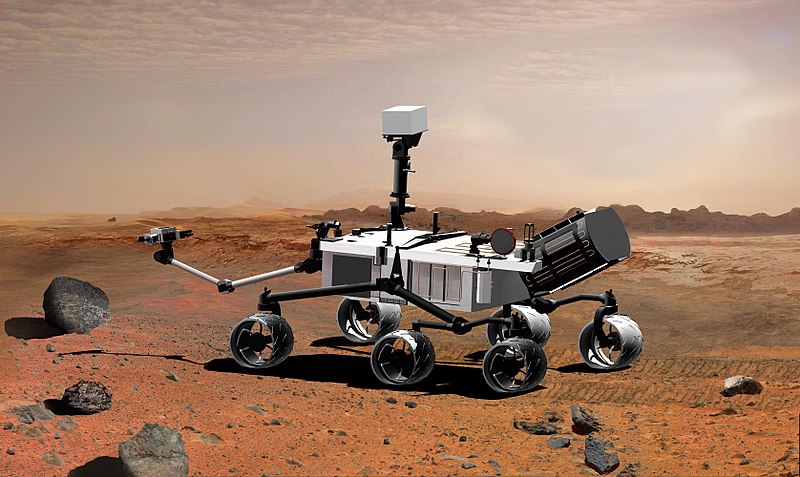
Curiosity è un rover NASA lanciato il 26 novembre 2011 ed atterrato su Marte il 6 agosto 2012. Subito dopo l’atterraggio, effettuato con successo usando un metodo più preciso delle missioni precedentemente inviate sul pianeta, il rover ha cominciato ad inviare delle immagini dalla superficie. La durata della missione è prevista in almeno un anno marziano (circa 2 anni terrestri) e lo scopo sarà quello di investigare sulla passata e presente capacità di Marte di sostenere la vita.
Per consentire analisi più approfondite, Curiosity trasporta strumenti scientifici, forniti dalla comunità internazionale, più avanzati rispetto a quelli di qualunque altra missione precedente sul pianeta rosso; è inoltre circa cinque volte più pesante e due volte più lungo dei rover Spirit e Opportunity arrivati sul pianeta nel 2004.
Il 22 luglio 2011 la NASA ha annunciato la zona verso cui la sonda sarebbe stata inviata: il cratere Gale. Il lancio è quindi avvenuto a novembre dello stesso anno per mezzo di un vettore Atlas V, e Curiosity è infine atterrato con successo su Marte il 6 agosto 2012 alle ore 5:14:39 UTC, 7:14:39 ora italiana. Durante la sua attività su Marte, il robot analizzerà dozzine di campioni del terreno e di roccia.
Il lancio sarebbe dovuto avvenire nel dicembre 2009 ed il MSL sarebbe dovuto atterrare su Marte ad ottobre 2010. In seguito a ritardi accumulati nello sviluppo degli attuatori che movimentano il rover, il lancio è stato però rinviato alla finestra di lancio successiva, compresa tra il 25 novembre 2011 e il 18 dicembre 2011, con arrivo su Marte nell’agosto 2012.
È quindi avvenuto con successo il 26 novembre 2011 da Cape Canaveral, a bordo del razzo Atlas V 541.

Le dimensioni del MSL a confronto con quelle dei suoi predecessori, il Mars Exploration Rover ed il Sojourner (Jet Propulsion Laboratory, 12 maggio 2008)
- Dimensioni: Il rover è lungo 3 metri e pesa circa 900 kg, di cui 80 kg in strumenti scientifici (in paragone i rover Spirit e Opportunity pesano 174 kg, di cui 6.8 kg in strumenti).
- Velocità: Il MSL è in grado di aggirare gli ostacoli e si muove con una velocità massima di 90 metri all’ora in navigazione automatica, tuttavia si prevede che ragionevolmente la velocità media sarà di circa 30 metri all’ora, a seconda dei livelli di potenza disponibili, l’eventuale terreno sdrucciolevole, e la visibilità. Durante i due anni di missione, viaggerà almeno per 6 km.
- Alimentazione: Curiosity è alimentato da un generatore termoelettrico a radioisotopi (RTG), come i precedenti lander Viking 1 e Viking 2 nel 1976.
- Computer: Il rover dispone due computer di bordo identici, chiamati “Rover Compute Element” (RCE) e contenenti circuiti a prova di radiazione per tollerare gli alti livelli di radiazioni provenienti dallo spazio: di questi, uno è configurato come backup e subentrerà in caso di gravi problemi al computer principale.Ogni computer dispone di 256 KB di EEPROM, 256 MB di DRAM, e 2 GB di memoria flash. Il processore utilizzato è il RAD750, successore del RAD6000 già usato con successo nella missione Mars Exploration Rover: ha una potenza di calcolo di 400 MIPS, mentre il RAD6000 è in grado di effettuare fino a 35 MIPS.
Comunicazioni: Curiosity è in grado di comunicare con la Terra in due modi: grazie a un trasponder operante nella Banda X, che gli permette di comunicare direttamente con il nostro pianeta, oppure grazie ad una antenna UHF, che comunica attraverso i satelliti in orbita intorno a Marte (in particolare il Mars Reconnaissance Orbiter). La seconda modalità di trasmissione sarà tuttavia quella più utilizzata nel corso della missione, poiché i satelliti hanno maggiore potenza di trasmissione ed antenne più efficienti. La velocità di trasmissione diretta dei dati è infatti compresa tra 0.48 e 31.25 kbps (circa la metà di una connessione con modem analogico); comunicando invece con i satelliti la velocità è notevolmente superiore: compresa tra 125 e 250 kbps. Sarà poi il satellite ad occuparsi della trasmissione dei dati verso la Terra. In ogni caso, il segnale radio impiega 13 minuti e 46 secondi per raggiungere il nostro pianeta.
Per la missione sono stati selezionati 10 strumenti:

Telecamere (MastCam, MAHLI, MARDI)
Tutte le camere sono progettate dalla Malin Space Science Systems e condividono gli stessi componenti, come l’elettronica di elaborazione delle immagini e i CCD a colori con risoluzione di 1600×1200 pixel.
- MastCam: fornisce spettri multipli e immagini in truecolor attraverso due camere stereoscopiche (tridimensionali). Le immagini truecolor sono a 1200×1200 pixel e c’è la possibilità di riprendere video ad alta definizione 1280×720 pixel a 10 frame al secondo con compressione hardware (in paragone la camera panoramica dei rover Spirit e Opportunity riprende immagini da 1024×1024 pixel in bianco e nero). La ruota dei filtri utilizzati dalla camera è invece la stessa di quella usata dai due rover che hanno raggiunto il pianeta nel 2004. Entrambe le camere possiedono uno zoom meccanico e possono riprendere immagini di oggetti ad una distanza di 1 km con una risoluzione di 10 cm per pixel.
- Mars Hand Lens Imager (MAHLI): simile al microscopic imager dei rover MER, è una camera montata su un braccio robotico e usata per acquisire immagini microscopiche di rocce e suolo. Le immagini saranno riprese a 1600×1200 pixel truecolor con una risoluzione di 12,5 micrometri per pixel. MAHLI avrà sia una illuminazione a LED sia in luce bianca che in UV per poter riprendere immagini al buio o per la fluorescenza.
- MSL Mars Descent Imager (MARDI): durante la discesa verso la superficie, la camera MARDI riprenderà circa 500 immagini a colori a 1600×1200 pixel a partire da un’altezza di 3,7 km fino a 5 metri dal terreno in modo da mappare il terreno circostante e il sito di atterraggio.
ChemCam
È un sistema LIBS che può individuare una roccia a distanza di 7 metri e vaporizzarne una piccola quantità per analizzare lo spettro della luce emessa usando la micro-imaging camera con campo visivo di 80 microradianti. Sviluppato dal Los Alamos National Laboratory e dal CESR Laboratory, il laser infrarosso che impiega per la vaporizzazione irradia impulsi di 5 ns con lunghezza d’onda di 1067 nm ed una densità di potenza pari a 1 GW/cm2, generando 30 mJ di energia. La rilevazione viene poi effettuata in uno spettro tra 240 nm e 800 nm.
Alpha-particle X-ray spectrometer (APXS)
È un sistema in grado di eseguire un’analisi PIXE, irradiando i campioni da studiare con particelle alfa e analizzando lo spettro dei raggi X che vengono emessi. È stato sviluppato dall’Agenzia Spaziale Canadese per determinare la composizione chimica delle rocce. Strumenti simili hanno preso parte alle missioni Mars Pathfinder e Mars Exploration Rover.
CheMin
CheMin (Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument) è uno strumento che usa la Diffrazione dei raggi X e la Spettrofotometria XRF per quantificare i minerali e la loro struttura presenti nei campioni. È stato sviluppato dal Jet Propulsion Laboratory.
Sample Analysis at Mars (SAM)
Il SAM è costituito da un Gascromatografo-spettrometro di massa e uno spettrometro laser, e ha il compito di analizzare i gas e i composti organici eventualmente presenti nei campioni atmosferici e del suolo. È stato sviluppato dal Goddard Space Flight Center NASA e dal Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA).
Radiation Assessment Detector (RAD)
Questo strumento permette di analizzare l’ampio spettro di radiazioni sulla superficie di Marte per determinare la possibilità e le protezioni necessarie ai futuri esploratori umani. Finanziato dal Exploration Systems Mission Directorate della NASA e sviluppato dal Southwestern Research Institute (SwRI).
Dynamic Albedo of Neutrons (DAN)
Sorgente e rilevatore di neutroni per misurare l’idrogeno, il ghiaccio e l’acqua vicino o sulla superficie marziana. Fornito dall’Agenzia Spaziale Russa.
Rover Environmental Monitoring Station (REMS)
Insieme di strumenti meteorologici fornito dal Ministero spagnolo dell’educazione e della scienza. Montato sull’albero della camera, misura la pressione atmosferica, l’umidità, la direzione e l’intensità del vento, la temperatura dell’aria e del terreno e i livelli di radiazione ultravioletta.
Hazard avoidance cameras (Hazcams)
Il rover ha due coppie di telecamere bianco e nero collocate ai quattro angoli dello stesso, simili a quelle presenti sui rover MER. Sono usate per evitare gli ostacoli durante la guida automatica e per posizionare in modo sicuro il braccio robotico sulla superficie e sulle rocce. Le telecamere hanno un angolo di campo di 120° e mappano il terreno fino a 3 m dal rover grazie alla visione stereoscopica.
Sono una coppia di telecamere bianco e nero montate sul braccio robotico per supportare lo spostamento a terra. Hanno un angolo di campo di 45° e sfruttano la luce visibile per ricostruire l’immagine 3D stereoscopica davanti alla telecamera.
Video realizzato dalla Nasa sulla missione