



Un gruppo di ricercatori del Centro di ricerca sulla cognizione animale dell’Università Paul Sabatier a Tolosa-CNRS, e del New Jersey Institute of Technology a Newark, negli Stati Uniti, che firmano un articolo su “PLOS Computational Biology”, è riuscito a riprodurre con robot miniaturizzati il comportamento di una colonia di formiche alle prese con il problema di orientarsi nei percorsi anche molto complicati dal formicaio alle fonti di cibo e viceversa.
Molte specie di formiche riescono a percorrere notevoli distanze senza perdersi. Gli studi hanno dimostrato che questi insetti stabiliscono una rete di percorsi che si biforcano continuamente formando schemi molto complessi. Per orientarsi in questo labirinto, le varie specie di formiche hanno elaborato strategie differenti, sfruttando quattro tipi diversi di informazioni, spesso combinate tra loro: visive (per esempio la posizione del sole) per stimare la direzione del formicaio, propriocettive (che derivano cioè dal calcolo delle successive orientazioni del corpo durante il cammino), sociali (la quantità di cibo trasportato dalle compagne sulla via del ritorno) e infine geometriche, riguardanti cioè la struttura della rete di sentieri.

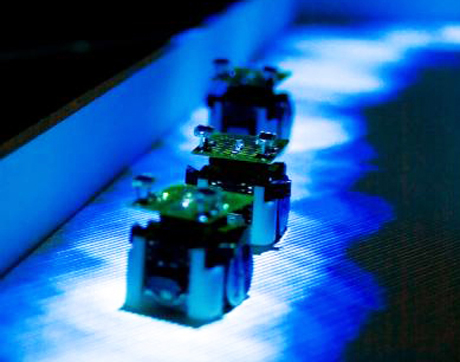
I microrobot usati nella simulazione mentre seguono i cammini di luce (Cortesia Simon Garnier/PLOS ComputationalBiology)
Rispetto a quest’ultimo punto, un recente studio ha dimostrato che, quando incontra una biforcazione, la formica argentina L. humile sceglie la via che devia di meno rispetto alla direzione da cui arrivava. Questo comportamento, associato al rilascio di feromoni che producono scie chimiche lungo il tragitto, conferisce alla formica argentina una notevole capacità di ritrovare la strada del formicaio tornando da una fonte di cibo appena scoperta.
Ma come fanno le formiche a scegliere la deviazione minima dal cammino? Si basano su una sorta di misurazione degli angoli tra diverse direzioni? Oppure su altri tipi di informazioni?
Garnier e colleghi hanno realizzato una simulazione del comportamento delle formiche argentine utilizzando robot miniaturizzati, delle dimensioni di una zolletta di zucchero, posti di fronte al problema di raggiungere un’area prestabilita percorrendo una rete di corridoi. Le tracce feromoniche sono state riprodotte con cammini di luce proiettati lungo i percorsi, che potevano essere seguiti dai mini-robot grazie a due fotorecettori, che imitavano le antenne delle formiche.
Per verificare il comportamento che emerge da capacità cognitive minime, i robot non erano dotati della capacità di misurare gli angoli, ma solo di procedere secondo un cammino casuale o seguendo le guide di luce (quando c’erano) e di evitare gli ostacoli.
Durante i test individuali, i robot hanno dimostrato di riprodurre in modo fedele lo schema di comportamento “esplorativo” delle singole formiche di fronte alle biforcazioni, muovendosi in modo casuale ma nella stessa direzione di massima, prima di trovare. Ciò dimostra, secondo gli autori, che gli insetti non misurano gli angoli tra le direzioni. Analogamente, a livello collettivo i robot sceglievano più spesso uno dei cammini più corti per trasferirsi dal punto iniziale a quello finale, esattamente come fanno le formiche.
“La ricerca stabilisce che comportamenti efficienti di esplorazione e di ricerca del cibo possono essere alla portata di organismi con risorse cognitive minime, come le formiche”, sottolinea Simon Garnier, che ha diretto lo studio.