



Che progressi sta facendo l’uomo nel campo della tecnologia spaziale? Qui troverete tutte le risposte
Paradigma Olografico
Le teorie di Aspect, Bohm, Pribram sulla nuova fisica scuotono i principi della scienza tradizionale: dalle particelle subatomiche alle galassie giga
Alla ricerca delle onde gravitazionali
La frontiera attuale per lo sviluppo della conoscenza dell’Universo è la prova delle onde gravitazionali che sono onde di metrica dello spazio-tempo d
![Z=int D^F left [rho left (xi right ) right ] exp left ( -{(26 - D) over 12 pi} int_xi left [ {1 over 2} {left (partial_a rho right )^2 over rho^2} right ] + int_xi mu_R^2 rho^2 right ).](https://videomisteri.altervista.org/wp-content/uploads/2009/01/df143df45660b0c007daf6c862aa8912.png)
Teoria delle Stringhe e Dimensioni Extra
La teoria delle stringhe, talvolta definita teoria delle corde, è una teoria della fisica che ipotizza che la materia, l’energia e in alcuni casi lo s
ISS la Stazione Spaziale Internazionale
Uno dei progetti più importanti per l’evoluzione umana è senza dubbio la Stazione Spaziale Internazionale.La Stazione Spaziale Internazionale (in ling
Chromoscope, il cielo come non l’avete mai visto
Come vedremmo le stelle se percepissimo lunghezze d’onda diverse da quelle della luce visibile? Lo rivela “Chromoscope, progetto aperto alla collabora
Herschel e Planck a caccia del Big Bang
In orbita, dopo diversi ritardi, i satelliti Herschel e Planck di progettazione europea (ESA).Herschel, così nominato in onore dell’astronomo Sir Fred
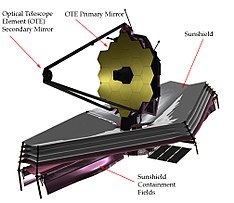
James Webb. Il telescopio spaziale che ci permetterà di vedere quasi il momento del Big Bang
Il telescopio spaziale James Webb è stato sviluppato appositamente per migliorare notevolmente l’osservazione nello spettro infrarosso, con l’obiettiv
- Come conosciamo la distanza delle stelle e delle galassie in astronomia
- La sonda autoreplicante di Von Neumann: il probabile metodo futuro che spianerà la strada delle stelle all’umanità
- James Webb. Il telescopio spaziale che ci permetterà di vedere quasi il momento del Big Bang
- Curiosity: l’ultima frontiera dell’esplorazione spaziale
- X-37B, il drone spaziale segreto americano
- La propulsione a curvatura, secondo gli scienziati, è possibile
- Viaggiare nello spazio con le Vele Solari. Un progetto possibile
- Il video stupendo della Terra ripresa dalla ISS realizzato dalla NASA
- L’ascensore spaziale: un metodo alternativo per andare nello spazio
- Il Toro di Stanford, un sistema per colonizzare lo spazio
- Il cilindro di O’Neill: il progetto per una colonia umana nello spazio
- La colonizzazione umana dello spazio: un sogno possibile?
- Il progetto Orione, l’astronave a propulsione nucleare
- Il corpo umano può vivere a lungo nello spazio? Ecco i problemi della scienza
- Cosa occorre agli astronauti per andare nello spazio
- L’evoluzione dei telescopi, dal cannocchiale allo Spitzer
- Chromoscope, il cielo come non l’avete mai visto
- Come conosciamo la composizione di Stelle e Pianeti
- La stella di Dyson e le civiltà aliene evolute
- Herschel e Planck a caccia del Big Bang
- ISS la Stazione Spaziale Internazionale
- La Tuta Spaziale
- Marte 500, la missione che porterà l’uomo su Marte
- Alla ricerca delle onde gravitazionali
- GMES: il sistema europeo per monitorare la Terra
- Teoria delle Stringhe e Dimensioni Extra
- Mistero Satelliti Pioneer anni ’70
- Spirit,Opportunity e il sogno di Marte
- Limite dell’Universo Conosciuto
- Futuro Dell’Esplorazione Spaziale
- Paradigma Olografico
- Large Hadron Collider
- Dal Voyager al Deep Space One